

-
首页
-
技术与产品
- 智能硬件
- 工业互联
- ꁇ 边缘网关
- ꁇ LoRaWAN组网
- ꁇ 电力线载波通讯模组
- 电力
- ꁇ 一键顺控装置
- ꁇ 底盘车物联网控制器
- ꁇ 机械特性监测装置
- ꁇ 低压综保控制模块
- 智能硬件
- 新能源
- ꁇ 清洁机器人控制器
- ꁇ 逆变器数据采集网关
- ꁇ 红外抄表采集装置
- ꁇ 储能EMS管理机
- ꁇ 就地显示屏
- 平台软件
- ꁇ 成套设备在线监测平台
- ꁇ 智能开关柜专家诊断系统
- ꁇ 母线槽智能在线监测平台
- ꁇ 光伏清洁机器人远程运维平台
- ꁇ 光伏电站远程运维平台
- ꁇ 新型储能管理系统EMS
- AI智能体
- ꁇ 智能画图机器人
-
解决方案
- 新能源
- “无人值守”光伏电站智能运维解决方案
- 光伏清洁机器人智能控制和运维解决方案
- 光伏柔性支架在线监测物联网解决方案
- 场站光伏组件缺陷现场检测解决方案
- 新型储能管理系统(EMS)解决方案
- 直流电源屏在线监测解决方案
- 电力
- 成套开关柜在线监测物联网解决方案
- 中低压电气设备智能化升级解决方案解决方案
- 多模态智能感知、一键顺控专家系统
- 真空断路器智能化解决方案
- 操作机构机械特性物联网软硬件一站式解决方案
- 母线槽智能在线监测解决方案
- 低压综保模块智能解决方案
- 工地临时配电箱在线监测物联网解决方案
- 机械装备
- 智慧供暖全景运营物联网解决方案
- 变频器物联网软硬件一站式解决方案解决方案
- 水泵物联网软硬件一体化解决方案
- 科研仪器在线监测物联网解决方案
- 智能割草机远程控制物联网解决方案
- 工业缝纫机物联网解决方案
- 电梯空调远程监控物联网解决方案
- 码头卸船机远程运维物联网解决方案
- 锯床在线监测物联网解决方案
- 矿山机械远程运维物联网解决方案
-
成功案例
- 电力
- 新能源
- 机械装备
-
新闻中心
- 公司新闻
- 行业新闻
-
关于我们
- 公司简介
- 联系方式
- 加入我们
- 咨询服务
-
首页
-
技术与产品
- 智能硬件
- 工业互联
- ꁇ 边缘网关
- ꁇ LoRaWAN组网
- ꁇ 电力线载波通讯模组
- 电力
- ꁇ 一键顺控装置
- ꁇ 底盘车物联网控制器
- ꁇ 机械特性监测装置
- ꁇ 低压综保控制模块
- 智能硬件
- 新能源
- ꁇ 清洁机器人控制器
- ꁇ 逆变器数据采集网关
- ꁇ 红外抄表采集装置
- ꁇ 储能EMS管理机
- ꁇ 就地显示屏
- 平台软件
- ꁇ 成套设备在线监测平台
- ꁇ 智能开关柜专家诊断系统
- ꁇ 母线槽智能在线监测平台
- ꁇ 光伏清洁机器人远程运维平台
- ꁇ 光伏电站远程运维平台
- ꁇ 新型储能管理系统EMS
- AI智能体
- ꁇ 智能画图机器人
-
解决方案
- 新能源
- “无人值守”光伏电站智能运维解决方案
- 光伏清洁机器人智能控制和运维解决方案
- 光伏柔性支架在线监测物联网解决方案
- 场站光伏组件缺陷现场检测解决方案
- 新型储能管理系统(EMS)解决方案
- 直流电源屏在线监测解决方案
- 电力
- 成套开关柜在线监测物联网解决方案
- 中低压电气设备智能化升级解决方案解决方案
- 多模态智能感知、一键顺控专家系统
- 真空断路器智能化解决方案
- 操作机构机械特性物联网软硬件一站式解决方案
- 母线槽智能在线监测解决方案
- 低压综保模块智能解决方案
- 工地临时配电箱在线监测物联网解决方案
- 机械装备
- 智慧供暖全景运营物联网解决方案
- 变频器物联网软硬件一站式解决方案解决方案
- 水泵物联网软硬件一体化解决方案
- 科研仪器在线监测物联网解决方案
- 智能割草机远程控制物联网解决方案
- 工业缝纫机物联网解决方案
- 电梯空调远程监控物联网解决方案
- 码头卸船机远程运维物联网解决方案
- 锯床在线监测物联网解决方案
- 矿山机械远程运维物联网解决方案
-
成功案例
- 电力
- 新能源
- 机械装备
-
新闻中心
- 公司新闻
- 行业新闻
-
关于我们
- 公司简介
- 联系方式
- 加入我们
- 咨询服务
【技术白皮书】光伏清洁机器人智能控制与运维技术协同集成规范白皮书


传统的“人海战术”在高电压、高海拔及极端气候下不仅安全风险巨大,且难以适应 GW 级电站的管理需求。因此,光伏清扫机器人系统(ARCS)已被界定为继组件、逆变器、支架之后的电站“第四大件”。“无人值守”自主运维是保障资产收益率(IRR)及降低度电成本(LCOE)的核心支架。

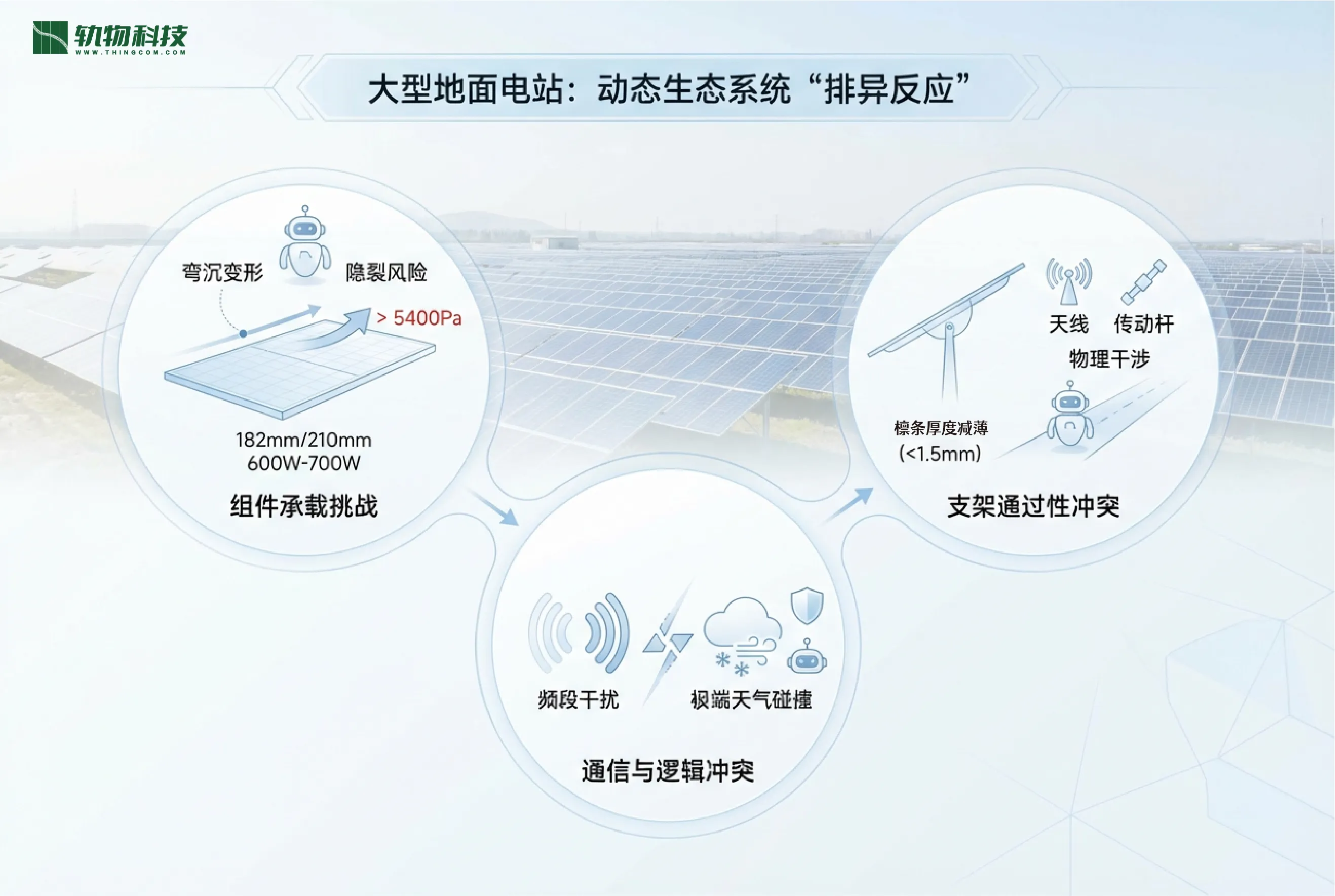
大型地面电站是一个复杂的动态生态系统,各子系统间技术迭代步调不一,导致了显著的“排异反应”。
·组件技术迭代的承载挑战: 182mm/210mm 超大尺寸组件(功率突破 600W-700W)已成主流。为追求降本,组件边框趋于减薄,导致机械载荷承载力接近临界点。机器人在长阵列作业时,其自重极易引发组件端部“弯沉”变形,若超出 5400Pa 机械载荷基准,将诱发电池片隐裂。
·支架结构演进的通过性冲突: 跟踪支架檩条厚度减薄(部分低于 1.5mm),导致支撑稳定性不足。支架上突出的天线、传动杆及回转齿轮等结构常与机器人作业路径产生物理干涉。
·通信与逻辑冲突: 无线频段重叠导致的信号干扰,使得机器人难以实时响应支架状态。在极端天气(如大风、大雪)下,若支架的保护保护机制与机器人作业逻辑未深度对齐,极易发生碰撞事故。

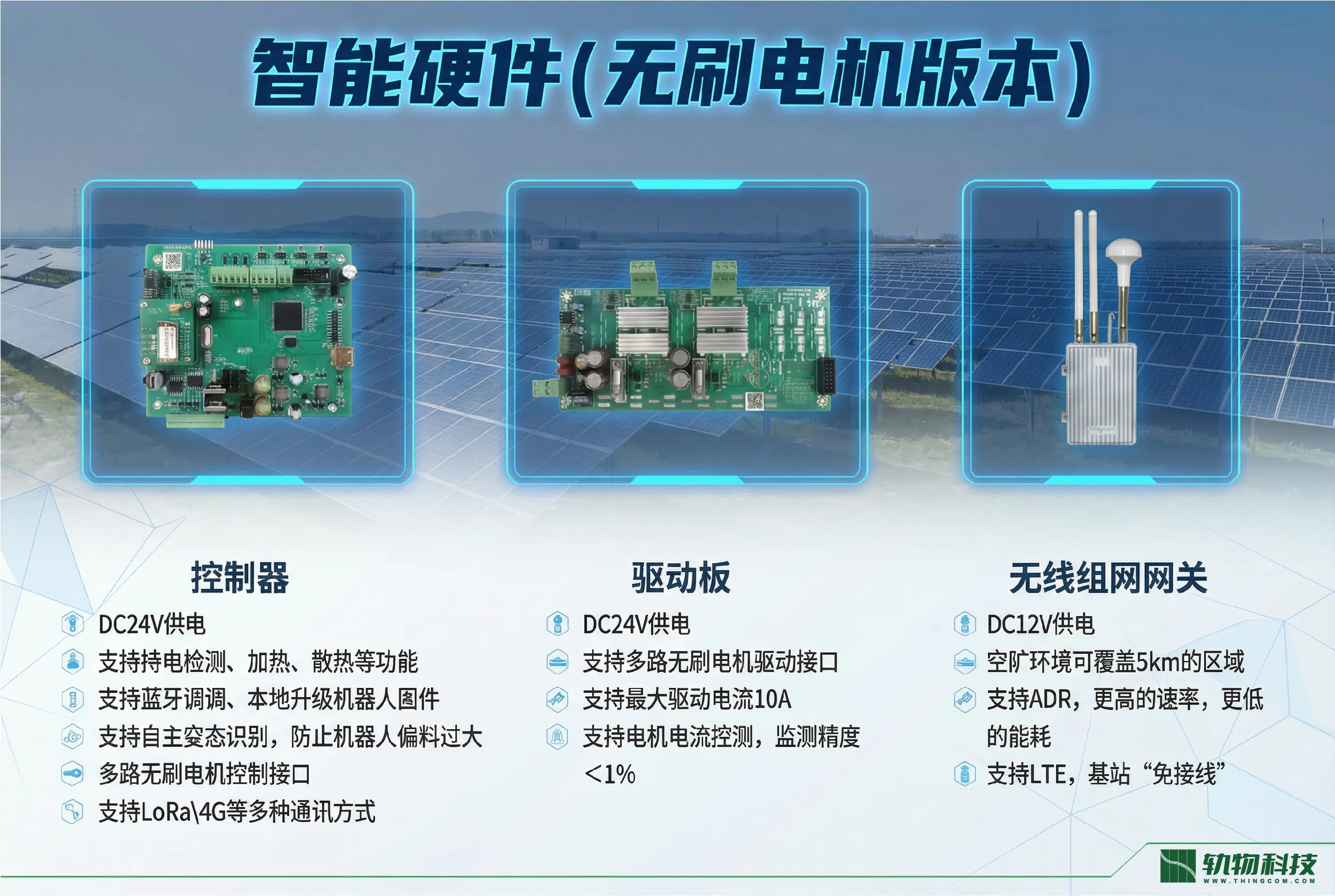
智能硬件作为“无人值守”底层基础,必须针对不同电站需求提供高度可靠的定制化标准。
·控制器: 采用 DC24V 供电,核心必须具备自主姿态识别功能,防止偏斜过大。硬件须支持掉电检测及自动加热/散热,以适应极端工况。
·驱动板: 支持多路无刷驱动,最大驱动电流必须达到 10A。电机电流实时监测精度要求优于 1%。
·组网性能: LoRaWAN/LTE 组网覆盖范围应达 5km。应用 ADR(自适应速率)技术优化能效,LTE 方案需支持基站“免接线”快速部署。
· 控驱一体设计: 控制板必须精确管理 2 路行走轮电机与 1 路毛刷电机,最大驱动电流 10A,支持自主姿态识别及遥控器直接控制。
· 转运车多维联动: 专用转运车控制板需通过多路电机驱动口,协同控制升降电机、推杆电机与行走电机。配备多路限位检测,确保跨排搬运不脱轨。


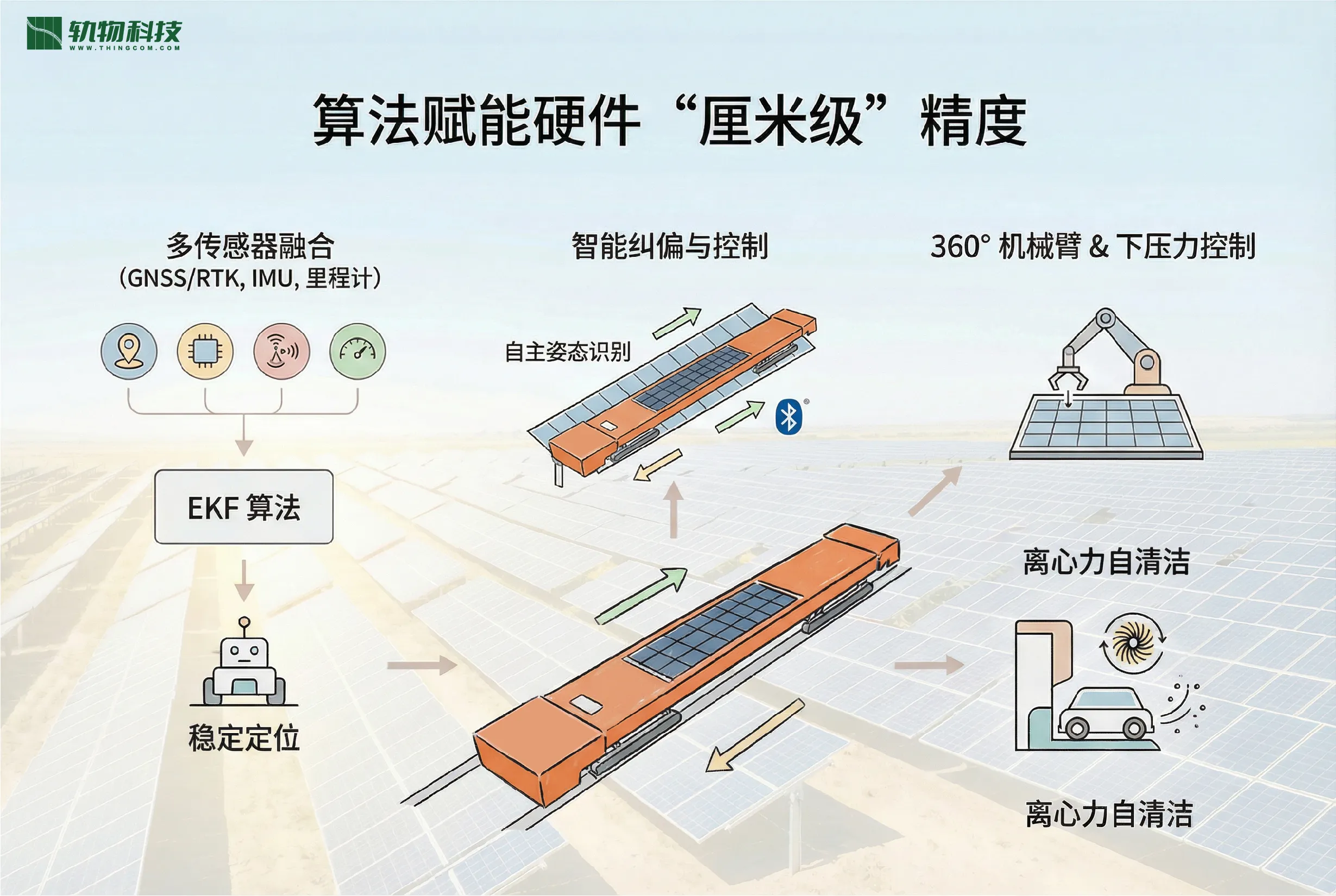
算法赋能硬件在非结构化环境下实现“厘米级”精度,是降低系统关联依赖的关键。
·多传感器融合定位方案: 运用扩展卡尔曼滤波(EKF)算法,将 GNSS/RTK(绝对位置)、IMU(姿态推算)与里程计/轮式编码器(相对约束)进行互补融合,解决卫星信号短期失效导致的定位漂移。
·智能纠偏与姿态控制: 自主姿态识别算法必须动态调整行走轮转速,防止长阵列上的偏斜,并支持蓝牙远程调试。
·智能调适机械臂与离心力自清洁: 360° 可旋转机械臂需毫秒级响应组件表面起伏,实现下压力闭环控制。当机器人返回停机位时,系统应触发离心力自清洁机制,通过自动提升滚刷转速抛离积聚粉尘,防止二次污染。
物理适配是系统稳定性的红线,必须建立涵盖材料、结构与逻辑的深度协同准则。
·玻璃与镀膜: 正面玻璃减反膜铅笔硬度需 ≥3H(载荷 500g),透光率 ≥94%。支持超亲水/超疏水设计以降低清洁难度。
·柔性连接结构: 推荐使用柔性 Binder(连接件)设计取代硬性螺栓固定。该设计允许组件间存在伸缩空间,有效分担机器人运行载荷,防止机械应力引发隐裂。
· 材料与结构强度: 支架檩条厚度不应低于 1.5mm。支架厂家在进行结构承载力计算时,必须将支架风载与机器人自重及冲击力一同考虑,特别是在紧急停机工况下的强度验证。
·钢边框对比优势: 针对极端温差地区,推荐评估钢边框组件。实测显示,钢边框自重变形量约 4mm(比铝边框减小 70%);在 35℃ 极端高温下,其变形量性能优于铝边框 91%。
·清扫模式逻辑与接口: 支架需预设夜间自动转动至 20° 清扫位。天线安装位置必须优化,避开毛刷运行路径以防止物理干涉。
·通信与响应时延: 防风告警等关键信息上传延迟必须达到秒级;非关键信息(如角度、位置)允许适当延时。机器人 SCADA 系统应与支架/气象站数据开源互通。
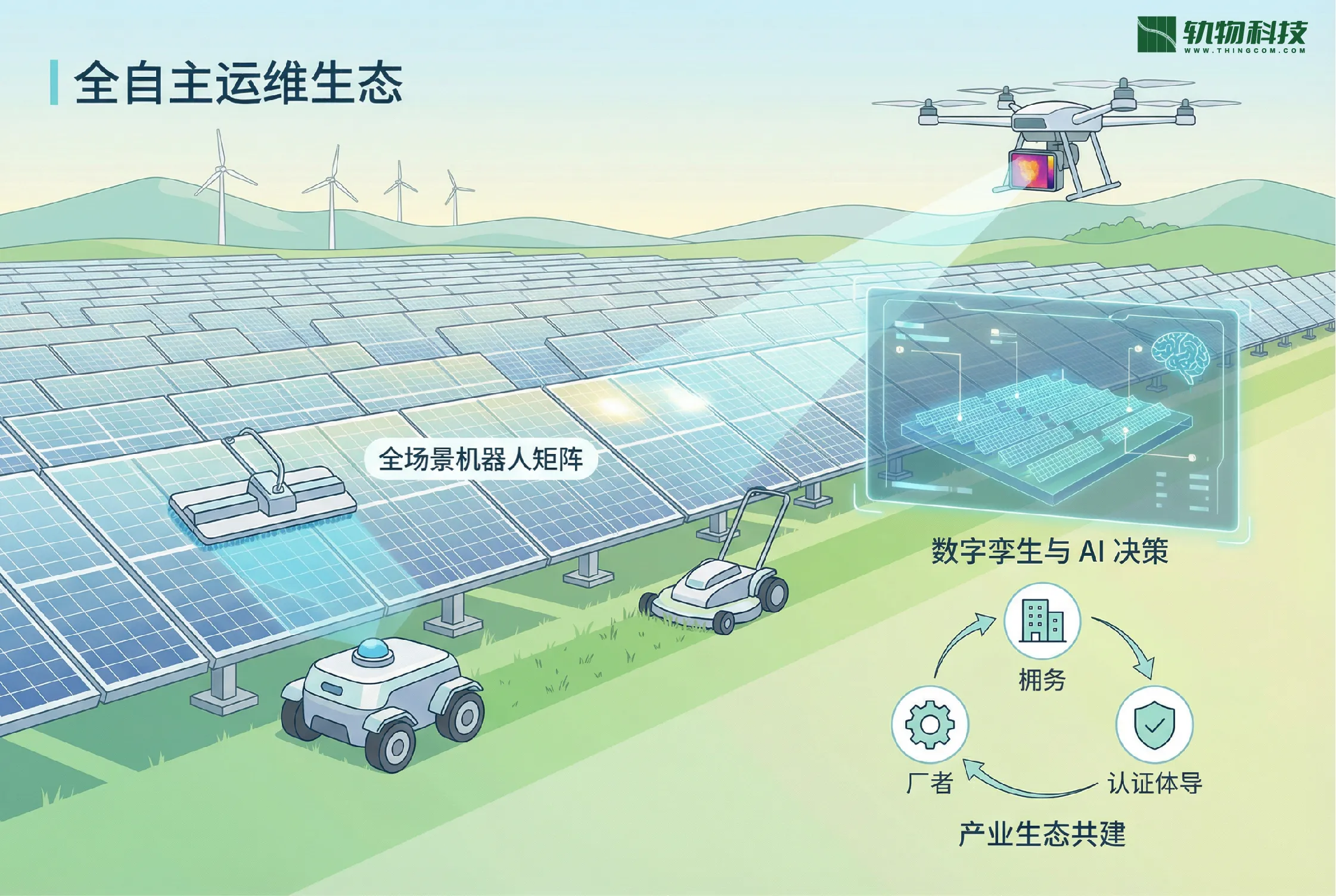
未来的光伏运维将迈向“比特”与“瓦特”的极致融合,构建全自主运维生态。
·全场景机器人矩阵: 运维将从单一清洁向安装、割草、巡检机器人矩阵演进。无人机红外巡检可与机器人联动,实现“发现热斑-针对性清扫-复检”的业务闭环。
·数字孪生与 AI 决策: 利用数字孪生构建 1:1 动态模型,基于 AI 大模型预测发电量并自动调度清洁任务,以匹配最优电价波动。
·产业生态共建: 倡议建立制造商、业主与第三方认证机构的协同机制,推动全球统一的技术标准,使智能化清扫成为先进光伏电站的标配。
1.IEC 60904-9:2020:光伏器件 - 太阳模拟器性能要求
2. IEC 61215-1:2021:地面用光伏组件 - 设计鉴定和定型标准
3. IEA (2023):Soiling losses - impact on the performance of PV power plants













